Overview
Fall Quarter:Focused on research, design work, and developing the Preliminary Design Report (PDR). Software development concentrated on creating a ground station capable of receiving and displaying telemetry data from the CanSat’s sensors, while the hardware team worked on electrical and mechanical prototype designs.Winter Quarter:Dedicated to preparing and practicing for the Preliminary Design Review (PDR) presentation, with all subteams refining their work to meet competition standards.Spring Quarter:Implemented the designs into physical solutions, including ordering electrical components, assembling container segments, and testing the system’s performance to ensure compliance with competition requirements
Project Definition
Planning
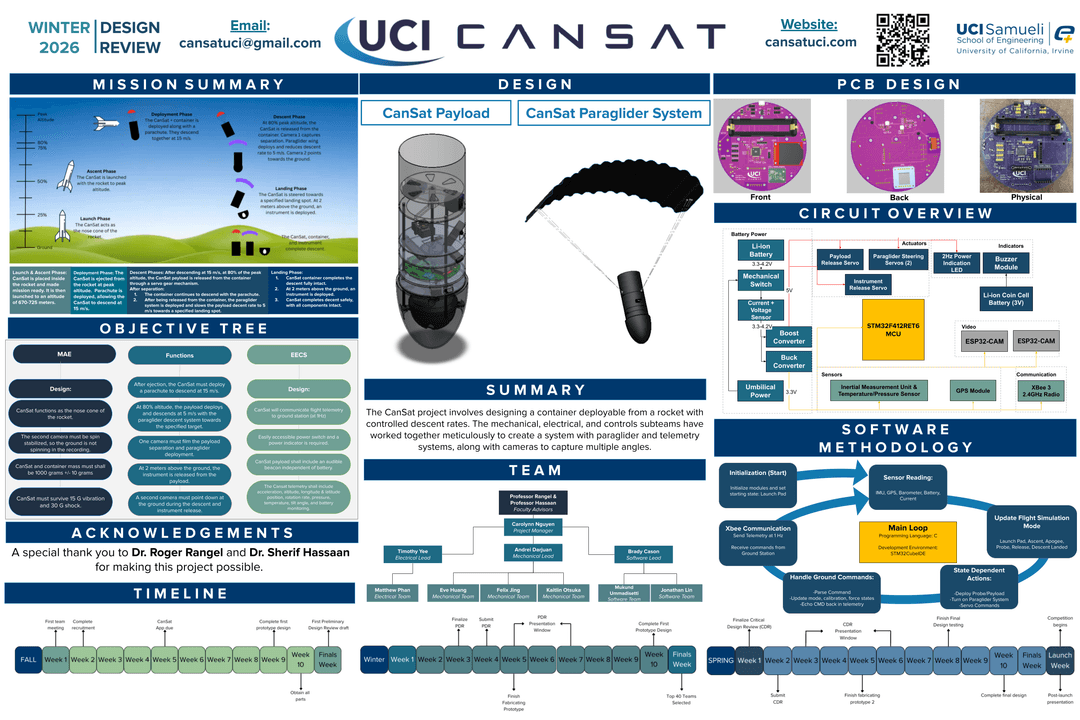
Telemetry, the automated process of collecting and transmitting data remotely, has played a critical role in aerospace systems since the 1930s. Sponsored by the American Astronautical Society, the CanSat Competition challenges university teams to design, build, and operate a fully functional aerospace system within strict mission constraints. Teams experience the complete engineering lifecycle, from conceptual design and testing to launch operations and post-flight analysis. For the 2025–2026 competition, teams are tasked with developing a deployment system capable of autonomous aerial descent, controlled navigation, and precision payload delivery while continuously transmitting telemetry data to a portable ground station.
Problem Statement
The mission requires designing a CanSat system that fits within the volume and shape of a standard soda can and functions as the nose cone of the launch vehicle during ascent. After launch, the system must safely descend under parachute at approximately 15 m/s before deploying a secondary parafoil-guided payload at 80% of the vehicle’s peak altitude.
Once deployed, the payload must autonomously navigate toward a designated landing target while descending at approximately 5 m/s. During descent, the system must release an egg payload from an altitude of 2 meters above the ground without causing damage to the egg upon landing.
The CanSat must also:
- Transmit telemetry data at 1 Hz throughout the mission
- Record onboard video footage of payload deployment and descent
- Maintain autonomous flight operations after separation
- Operate using a fully portable custom ground station

Components
Top Cap
Houses the primary parachute deployment system and stabilizes the CanSat after rocket ejection.
Body
Contains the avionics, telemetry systems, power distribution, and deployment electronics for mission operations.
Payload
Autonomous parafoil-guided subsystem containing navigation, cameras, steering, and egg-drop deployment systems.
Conceptual / Preliminary Design
Major Components
The CanSat system is divided into three major sections that work together to accomplish the mission objectives. The first section is the top cap, which acts as the aerodynamic nose cone during ascent and houses the primary parachute deployment system. Its primary purpose is to ensure safe stabilization and controlled descent immediately after rocket deployment. The second section is the body, the central cylindrical structure connecting the top cap and payload subsystem. This section contains the avionics stack, telemetry hardware, onboard processing systems, batteries, and deployment electronics necessary for mission operations and communication. The third section is the payload subsystem, which serves as the autonomous guided delivery system. After deployment, the payload navigates toward the target landing zone using a parafoil steering system while recording onboard footage and deploying the egg payload at the required altitude.
Our Works
Mechanical
The Mechanical subteam is responsible for the design, analysis, manufacturing, and assembly of the CanSat structural and deployment systems. The team develops the payload-container release mechanism, paraglider deployment mechanism, egg protection system, and internal mounting structures while ensuring compliance with all competition dimensional and mass requirements. Mechanical members perform structural, shock, and descent-related calculations to verify the system can survive launch, deployment, and landing conditions. In addition, the Mechanical Team collaborates closely with the electrical and software teams to ensure proper integration of sensors, electronics, and deployment controls throughout the mission.
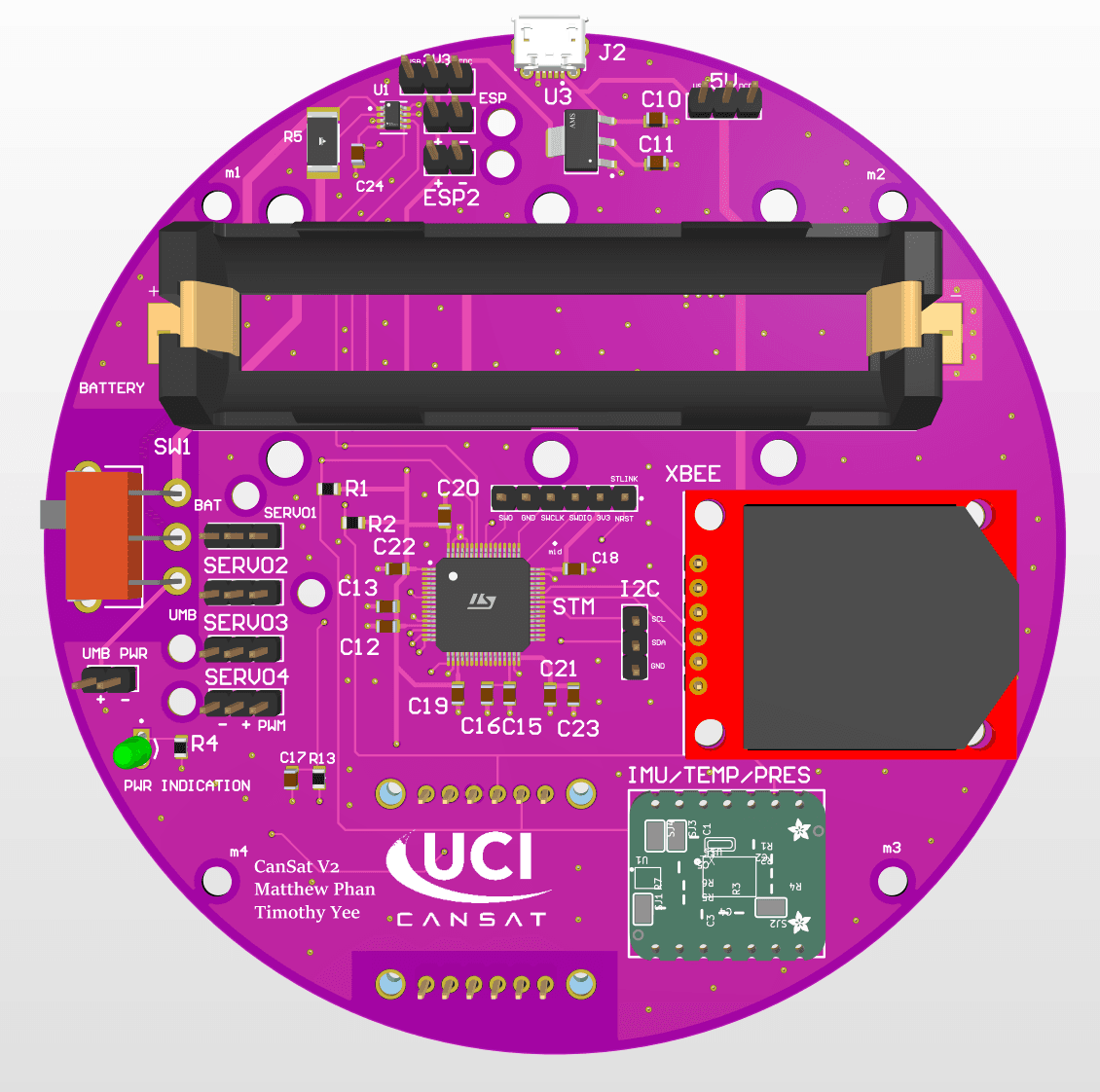
Electrical
The electrical subteam was responsible for designing and manufacturing the avionics printed circuit board (PCB). Our PCB connects an array of sensors, GPS, cameras, and radio to the main microcontroller (STM32) and relevant power components, such as buck/boost converters. We began the year by outlining the competition requirements and performing trade studies to decide which components would be suitable. Then, we designed the PCB throughout the year, creating two iterations in total with improved EMI performance and small mechanical improvements along the way. Our first revision was hand soldered to reduce costs and provide SMD soldering experience, while our second revision came pre-soldered for the sake of time and professional quality. Finally, we conducted numerous drop tests by integrating with the other subteams to prove our system's robustness, and to fix any standout issues before competition.
Controls
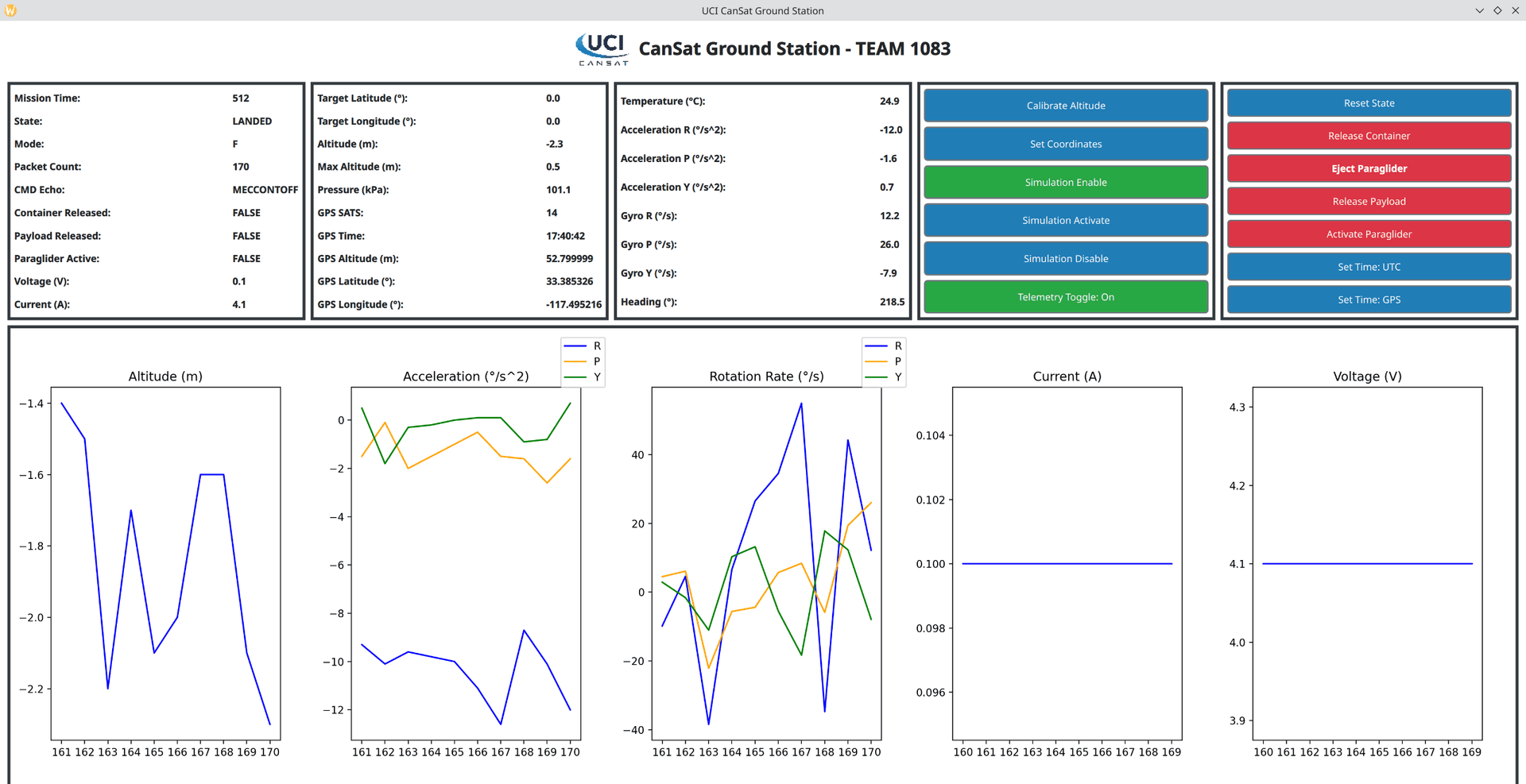
The Controls subteam wrote the software for the STM32 flight computer and designed a custom "book-like" ground station to comminucate with the CanSat. The flight software implements a PID paraglider control algorithm that uses 2 servos to pull on the strings of the paraglider to steer it towards the landing coordinates. The ground station, run on a RaspberryPi, communicates with the CanSat using an Xbee radio device. It has buttons and switches to send commands, such as "Eject Paraglider" or "Activate Simulation Mode". It also has LED's, a servo, and a screen to graph data and indicate the CanSat state.
Posters
Winter Design Review